
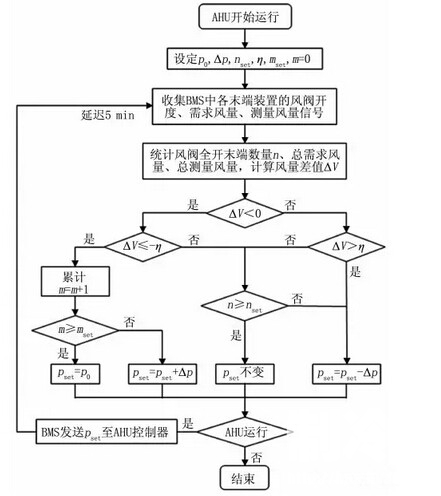
送风静压自适应控制流程图
1)控制算法程序根据BMS中AHU开始运行的状态启动自适应静压控制流程,给定初始静压设定值p0、送风静压设定值增减量Δp(取3~5 Pa),风阀全开末端个数阈值nset(取1个或2个)、总风量差值ΔV的设定阈值η(取全部末端装置的最大风量设定值总和的2%左右)、ΔV<-η次数设定阈值mset(取6,即0.5 h的时间)等。
2)收集BMS中各末端装置的风阀开度、需求风量、测量风量信号,统计风阀全开的末端数量n、总需求风量和总测量风量,计算风量差值ΔV。
3)当-η≤ΔV≤η时,如果风阀全开末端个数n≥nset,说明送风量满足空调负荷需要,且大部分末端的风阀开度在最佳位置,应保持送风静压设定值不变;当ΔV>η且n
4)如果AHU仍在运行中,BMS将送风静压设定值发送至该AHU的控制器上,完成静压自适应设定,并开始下一循环(每5 min一个循环)的静压自适应设定;如果AHU停止运行,控制算法程序自动终止静压自适应设定,并一直检测该AHU是否启动运行。
对于实际变风量空调系统,末端装置长时间运行可能出现卡死、堵塞、测量装置失效等硬故障,从而引起很大的监控信号误差,导致总测量送风量和总需求风量相差很大,影响送风静压自适应设定结果,导致风机能耗更大。因此,该控制方法首先设定一个ΔV<-η的循环次数上限值mset,若ΔV<-η这种情况连续出现的次数超过该上限值mset,则认为末端装置存在硬故障,静压设定值将自动恢复为初始设定值。
本文研究涉及的变风量空调系统是采用PID控制规律的恒值控制系统,即静压设定值保持不变,如150 Pa。在定静压控制模式(恒值控制)下,通过调整控制器的PID参数均能实现系统稳定控制。本文提出的变风量系统静压自适应控制方法,同样是恒值PID控制,只是静压设定值在5 min和更长时间内保持不变,也就是说,恒值时间缩短了而已。因此,只要原系统的控制是稳定的,在采用了静压自适应控制方法后系统同样是稳定的。而且静压设定值增量Δp很小(Δp=3或5 Pa,远小于初始静压设定值p0),每次改变静压设定值后,管道静压的阶跃响应过渡过程时间非常短(远小于5 min)。在此不进行稳定性分析。



 鲁公网安备 37131202371556号
鲁公网安备 37131202371556号